Stochastic optimal control simulations of walking: potential and perspective
Stochastic optimal control simulations of walking: potential and perspective
D'Hondt, L.; Afschrift, M.; De Groote, F.
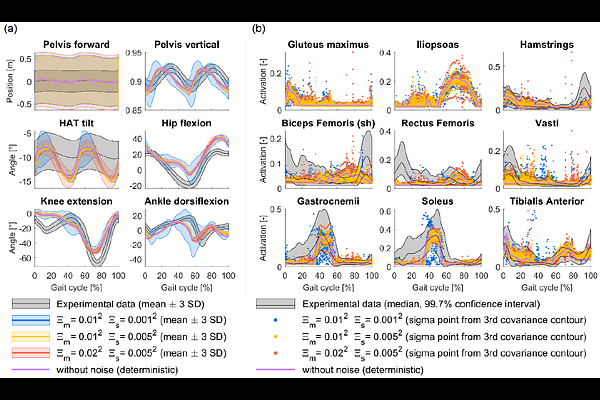
AbstractHuman walking is intrinsically variable. For example, there is considerable stride to stride variability even when walking speed is constant. This variability is due to uncertainty in the sensorimotor system and the environment, and is shaped by both musculoskeletal dynamics (e.g. joint stiffness and damping originating from muscles) and the control strategy used to mitigate the effects of uncertainty. Yet, insight into how sensorimotor noise shapes walking variability is limited due to a lack of experimental methods to assess sensorimotor noise and control strategies during walking. Simulations that account for uncertainty can elucidate how sensorimotor noise affects movement variability but due to numerical challenges, accounting for sensorimotor noise is not common in simulations of walking. Existing simulations have hugely simplified musculoskeletal dynamics (e.g. no muscles), the control policy (e.g. pre-defined feedback loops), or sensorimotor noise sources (e.g. only motor noise). Here, we performed stochastic optimal control simulations of walking based on a model with 9 degrees of freedom and 18 muscles to study how the level of sensory and motor noise influences walking. We solved for feedforward muscle excitations and full-state time-varying feedback gains that minimised expected effort while generating periodic, and hence stable, gait patterns. To enable these simulations, we approximated the state distribution with a Gaussian and used an unscented transform to propagate the state covariance. Resulting optimisation problems were solved with direct collocation. Sensorimotor noise level had a small effect on the mean kinematics but shaped kinematic and muscle activity variability as well as expected effort. Although simulations underestimated the magnitude of experimental positional variability, they captured its structure. In agreement with experimental results, the control policy prioritised limiting variability of centre of mass kinematics and minimal swing foot clearance over limiting joint angle variability. Hence, our simulations suggest that effort minimisation underlies these observations.